PPM, PPF, and Acceptance Protocol
Version: 1.2
Applies to: IndoAI edge AI cameras, IndoAI AieIP cameras, IndoAI edge AI box deployments, and any IndoAI-led site design where video outcomes are promised.
1) What this document is
This is IndoAI’s practical, field-ready standard for designing, validating, and signing off video outcomes using:
- Pixel Density: PPM (pixels per meter) and PPF (pixels per foot)
- Capture Quality: shutter, motion blur, lighting, angle, compression, focus
- Acceptance: on-site measurements, test runs, and evidence package
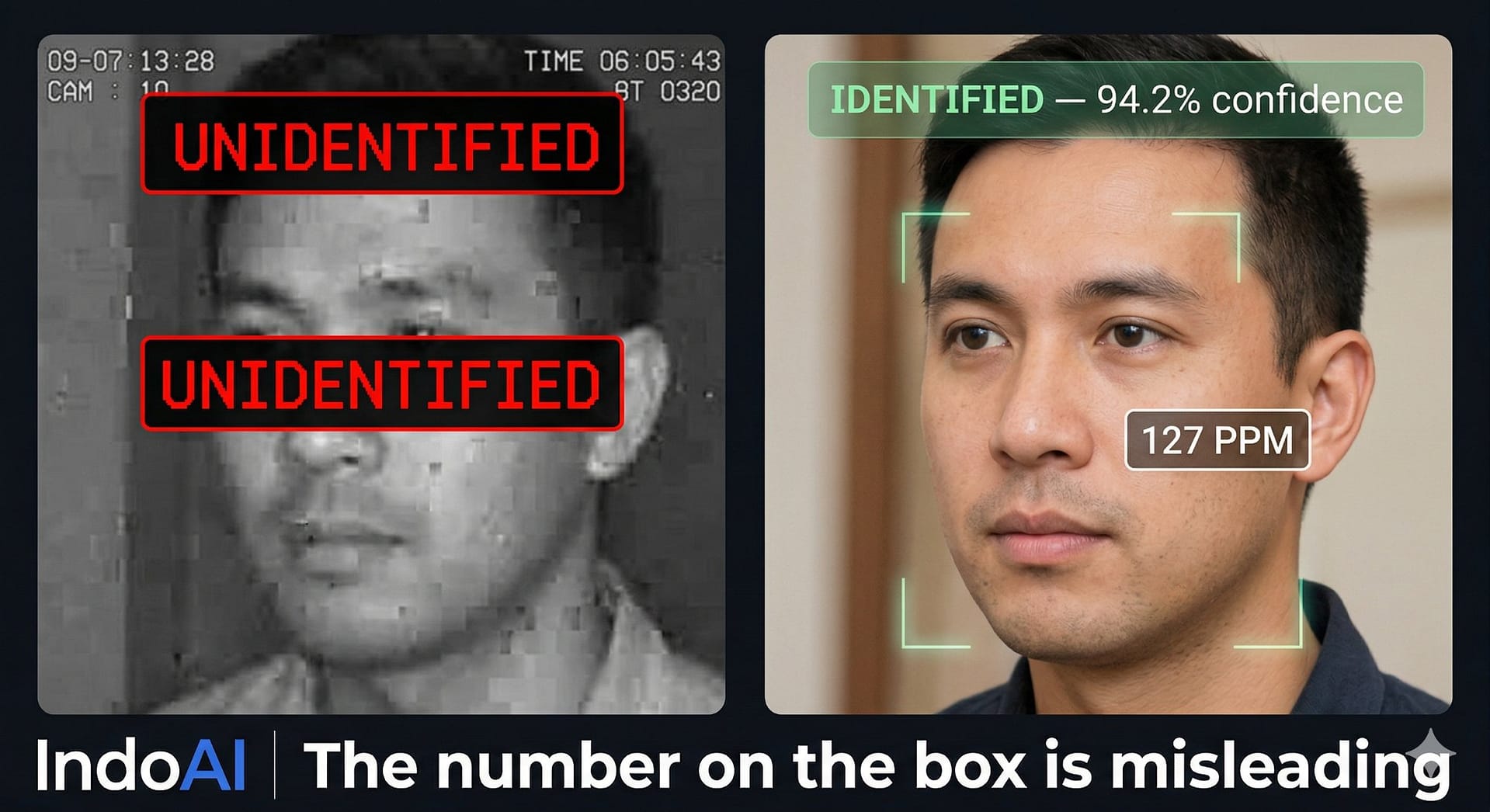
Pixel density is necessary but not sufficient. IndoAI treats “video outcomes” (face verification, number plate recognition, forensic review, reliable alerts) as a combination of pixel density plus capture quality plus acceptance testing.
2) Key terms and quick definitions
1.1 Pixel density
- PPM (Pixels Per Meter): number of horizontal pixels representing 1 meter of real-world width at a defined target plane
- PPF (Pixels Per Foot): same concept, per foot
Conversion:
- 1 meter = 3.28 feet
- PPF ≈ PPM / 3.28
- PPM ≈ PPF × 3.28 1.2
1.2 Target plane (critical concept)
A target plane is the real-world line or zone where the outcome must work, for example:
- Gate line (where faces/plates must be captured)
- Doorway line
- Lane capture line
- Perimeter line
All measurements and acceptance are done at the target plane.
1.3 “Megapixels” vs usable detail
Megapixels describe sensor resolution. Usable detail at the target plane is determined by:
- Distance to target plane
- Lens field of view
- Scene width at target plane
- Motion blur and focus
- Lighting and dynamic range
- Compression artifacts
3) IndoAI planning framework: pick the outcome first
IndoAI uses an outcome-led workflow:
- Define the decision/outcome
- Define the target plane
- Choose pixel density target
- Choose lens, mounting, and distance to hit the target
- Enforce capture-quality constraints
- Validate and sign off using acceptance protocol
4) Pixel density targets (IndoAI baseline)
3.1 Human-viewing operational levels (DORI-style baseline)
Use these as the minimum planning floor for human interpretation and general monitoring.
Operational requirement | Practical meaning | PPM | PPF |
Detect | Notice presence (person/vehicle exists) | 25 | 8 |
Observe | Describe attributes (clothing, vehicle type) | 63 | 20 |
Recognize | Recognize a known person later | 125 | 40 |
Identify | High-detail identification (forensic-quality) | 250 | 80 |
3.2 IndoAI margin rule (mandatory for AI-promised outcomes)
For outcomes where you are promising AI performance (FR, LPR, strong forensic claims), IndoAI applies a margin:
- Recommended design target = 1.5 × minimum target
Examples:
- Identify baseline 250 PPM becomes 375 PPM recommended
- Recognize baseline 125 PPM becomes 190 PPM recommended (round to 200 PPM)
This margin exists because real deployments lose effective detail due to noise, motion blur, glare, and compression.
5) IndoAI use-case targets (quote-ready)
4.1 People-focused use cases
Use case | IndoAI minimum | IndoAI recommended |
Perimeter intrusion / loitering alert | 25–63 PPM | 63–125 PPM |
People counting / queue monitoring / occupancy | 63 PPM | 125 PPM |
General monitoring with post-event review | 125 PPM | 200 PPM |
Visitor identity review (forensic, post-event) | 250 PPM | 375 PPM |
Face verification at controlled entry (AI outcome) | 250 PPM at face plane | 375 PPM at face plane |
Important: Face outcomes also require good face pose (near-frontal), stable lighting, and low motion blur. Pixel density alone will not guarantee recognition quality.
4.2 Vehicle number plate recognition (ANPR/LPR)
For LPR, IndoAI uses pixels across plate width as the primary control, supported by pixel density at the plate plane.
IndoAI targets (single-lane controlled gate):
- Minimum: 100 pixels across plate width
- Recommended: 120–150 pixels across plate width
Why this metric: It directly links to the legibility of characters, and is easier to verify on-site at the capture line.
6) How to calculate pixel density (PPM) in the field
5.1 Simple method (scene width)
PPM = horizontal pixels / scene width (meters)
Example:
- Camera horizontal resolution: 3840 pixels
- Scene width at target plane: 20 meters
- PPM = 3840/20 = 192 PPM
5.2 Using HFOV (horizontal field of view)
If you know the camera’s HFOV and distance to target plane:
- Scene width = 2 × distance × tan(HFOV/2)
- Then compute PPM.
5.3 Why you must measure on-site
Spec sheets, assumed HFOV, and mounting deviations can produce design drift. IndoAI requires on-site verification (Section 8) before sign-off.
7) Capture quality controls (this is what makes the design work)
Pixel density is the “quantity of detail.” Capture quality is “whether the detail survives real conditions.”
6.1 Universal capture quality requirements (applies to all use cases)
Focus
- Verify focus at the target plane
- Avoid relying on infinity focus for close targets
- Re-check after installation tightening and weatherproofing
Motion blur
- Ensure shutter speed is fast enough for expected motion
- At night, avoid “bright but blurry” video; blur kills analytics
Lighting
- Prefer front lighting at target plane
- Avoid backlit faces at entry
- Control glare and reflections (especially plates, glass doors, wet roads)
Compression
- Over-compression destroys fine edges and characters
- Use sufficient bitrate and stable encoding settings for critical cameras
- Avoid “auto” bitrate that collapses quality at night due to noise
Angles
- Extreme top-down angles reduce face usability
- Side angles increase face pose variance and plate skew
8) IndoAI capture profiles for high-stakes outcomes
7.1 Face verification at controlled entry (AI outcome)
Goal: consistently capture near-frontal faces at the capture line.
Scene design
- Place the target plane where people naturally slow down or face forward examples: doorway choke point, turnstile, reception entry, gate with guidance signage
- Avoid mounting too high; reduce top-down faces
- Avoid placing capture line in heavy backlight zones
Recommended acceptance condition
- Day and night samples show clear eye/nose/mouth structure at the target plane
- Motion blur is minimal during typical walking speed
- Pixel density meets the target at the face plane (250 PPM minimum, 375 PPM recommended)
7.2 LPR/ANPR single-lane gate (AI outcome)
Goal: readable plates in motion, day and night, with stable exposure.
Lane controls
- Create a capture line where vehicles slow down examples: barrier gate, speed breaker, ticket point
- Keep the plate as head-on as possible; reduce skew
- Control headlights and reflective glare
Exposure controls (high importance)
- Use short shutter to freeze motion at expected speeds
- Cap gain to avoid IR washout and noise-driven artifacts
- Be cautious with aggressive WDR settings that can smear or artifact moving plates
Lighting controls
- Night LPR often needs dedicated illumination strategy (built-in or external IR)
- Position illumination to minimize glare and maximize plate legibility
Primary measurement
- Verify pixels across plate width at the capture line (100 minimum; 120–150 recommended)
9) IndoAI acceptance protocol (mandatory sign-off)
8.1 What must be defined before testing
- Target plane for each promised outcome
- Expected distance range to target plane (min/typical/max)
- Outcome category (Detect, Observe, Recognize, Identify; LPR plate width target)
- Day and night operating conditions (lighting, vehicle speeds, traffic)
8.2 On-site pixel density verification
PPM measurement method
- Place a known width marker at target plane (1 meter recommended)
- Count the horizontal pixels spanning that 1 meter in the live view or captured frame
- That count is your PPM
Pass criteria
- Measured PPM at target plane meets the selected target (minimum or recommended, depending on what is promised)
8.3 LPR verification
- Measure pixels across plate width at the capture line
- Test both day and night
- Test with realistic vehicle approach speed and lane behavior
- Capture a sufficient sample set (see checklist)
8.4 Evidence package (required deliverable)
For every critical camera or lane where outcomes are promised:
Screenshots
- 3 day + 3 night screenshots at the target plane, with measurement visible when possible
Clips
- 30–60 seconds day + 30–60 seconds night showing real flow
Settings summary
- Resolution, FPS, bitrate/quality mode
- Shutter constraints and gain constraints where relevant
- WDR setting state where relevant IR/illumination notes where relevant Result log
- Short test log with success rate and top failure patterns (if any)
10) One-page IndoAI cheat sheet (printable)
9.1 Outcome to target
Outcome | Minimum target | IndoAI recommended |
Detect | 25 PPM | 63 PPM |
Observe | 63 PPM | 125 PPM |
Recognize | 125 PPM | 200 PPM |
Identify | 250 PPM | 375 PPM |
9.2 LPR targets
- Pixels across plate width at capture line
- Minimum: 100 px
- Recommended: 120–150 px
9.3 Fast math
- PPM = horizontal pixels / scene width (m)
- Scene width = 2 × distance × tan(HFOV/2)
9.4 Quick fixes if quality is failing
- PPM too low: narrow HFOV, move camera closer, add a dedicated capture camera
- Night blur: shorten shutter, improve illumination, reduce gain noise
- Plates failing: tighten angles, reduce glare, enforce shutter, validate IR strategy
- Blocky faces/plates: increase bitrate, reduce compression aggressiveness, stabilize FPS
11) Acceptance checklist (copy-paste into project SOP)
10.1 Universal checks (all projects)
- Target plane defined and marked
- PPM measured at target plane
- PPM meets design target
- Focus verified at target plane
- Day and night samples captured
- Motion blur acceptable for typical movement
- Encoding is not over-compressed for critical streams
- Evidence package stored and attached to deployment record
10.2 Face verification checklist (controlled entry)
- PPM at face plane meets target (250 minimum, 375 recommended)
- Face pose at target plane is near-frontal for most entries
- Backlight does not silhouette faces
- Day test: at least 10 real passes
- Night test: at least 10 real passes
- Store 10 day face crops and 10 night face crops (from real passes)
10.3 LPR checklist (single-lane gate)
- Plate pixel width meets target (100 minimum, 120–150 recommended)
- Capture line is where vehicles slow down
- Shutter is short enough to freeze expected motion
- Gain is capped; plates are not washed out at night
- WDR state documented; does not degrade moving plate readability
- Day test: at least 30 passes
- Night test: at least 30 passes
- Store at least 20 plate crops day and 20 night (real passes)
10.4 Perimeter intrusion checklist
- PPM meets planned target in intrusion path
- No blind zones in the path
- Walk-test completed day and night
- False alert sources checked (trees, reflections, insects near IR)
- Save 2 clips day and 2 clips night of walk-test
Appendix A: IndoAI design worksheet (template)
For each critical camera:
- Use case and promised outcome
- Target plane location
- Distance range to target plane
- Required PPM or plate pixel width target
- Camera model, resolution, lens/HFOV
- Calculated PPM (design)
- Measured PPM (on-site)
- Capture quality notes (lighting, shutter, compression, angle)
- Acceptance result (pass/fail)
- Evidence links (screenshots/clips/settings log)